







[星岛综合报道]日本东京大学的研究人员近日展示了一个名为武藏(Musashi)的仿人机械人,其设计目的是模仿人类驾驶行为,并探索自动驾驶技术的新可能性。这个创新项目并非依赖于传统自动驾驶车辆常用的LiDAR、视觉相机和GPS等技术,而是直接让机械人坐在驾驶座上,模仿人类驾驶的方式来控制车辆。
武藏是由东京大学的研究团队在2019年开发的“肌肉骨骼仿人机械人”。这个机械人拥有类似人类的关节和肌肉结构,使其能够模仿人类的自然动作。研究团队希望通过这样的设计,使武藏能够像人类一样驾驶车辆,处理各种驾驶任务。
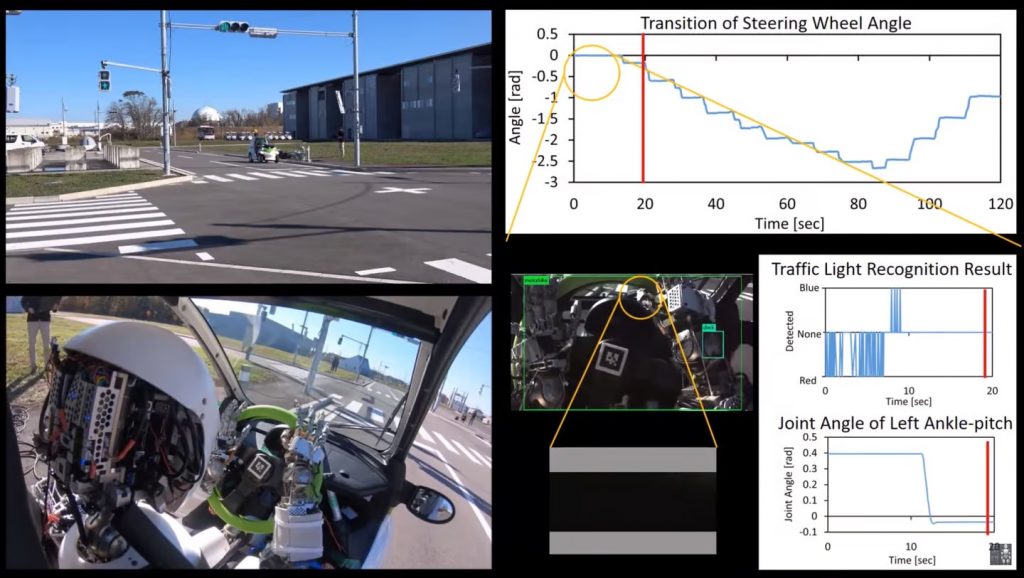
研究团队在东京大学校区进行了实地驾驶测试。在这些测试中,武藏被安装在一辆微型电动车内,并进行了各种驾驶操作。结果显示,武藏能够识别行人,对喇叭声和交通信号有回应,这些都表明其在模仿人类驾驶行为方面具有一定的能力。然而,研究人员也发现,武藏在处理更复杂的驾驶情况,例如斜坡和急转弯时,仍存在一些挑战。
这种方法的优点在于车辆不需要进行大量修改。相比于需要重新设计车辆内部系统的传统自动驾驶技术,武藏这样的机械人驾驶员可以直接使用现有的车辆。此外,机械人驾驶员在行程之间还可以执行其他任务,例如快递、巡逻甚至作为汽车安全测试假人。
武藏项目的成功不仅可以推动自动驾驶技术的进一步发展,还有望在其他领域产生广泛影响。例如,在物流行业,仿人机械人驾驶员可以取代人类驾驶员,减少劳动成本并提高效率。在安全测试中,这样的机械人可以提供更为准确和可控的测试数据,进一步提升车辆安全性。

尽管武藏在某些方面展示了其潜力,但要达到全面实用化还有很长的路要走。目前,武藏在应对复杂路况和长时间驾驶方面还存在局限,这需要进一步的技术改进。此外,机械人的感知和决策能力也需要大幅提升,以应对现实生活中的多变情况。
研究团队计划通过更多的实地测试和技术改进来克服这些挑战。他们希望能够在未来几年内,使武藏具备更强的驾驶能力,并能够在更广泛的应用场景中发挥作用。
图片:Kento Kawaharazuka et al
T10
