







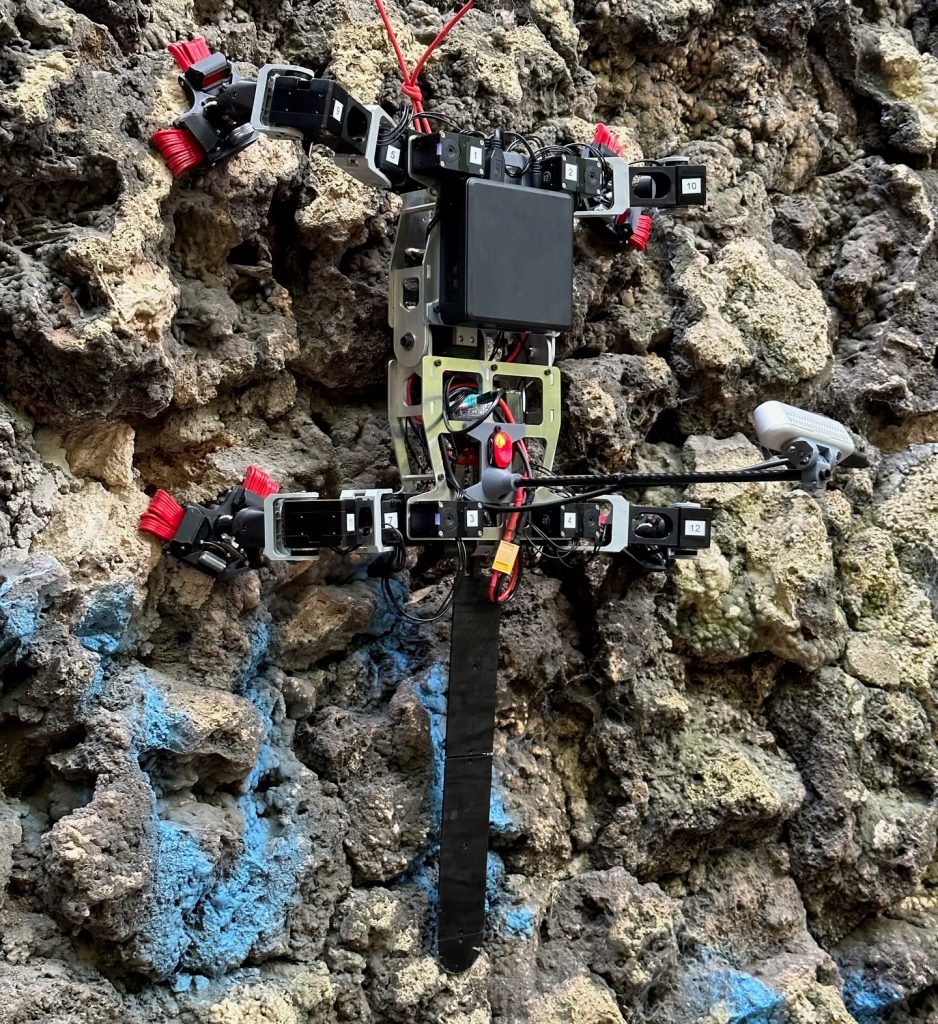
[星島綜合報道] 科學家們創造了一種四足仿生機械人,其攀爬方式與眾不同。它利用一種獨特而高效的機制,緊緊抓住粗糙的垂直表面,同時相對簡單。
一些實驗性機械人利用基於吸力的抓握系統來攀爬光滑表面,但這種技術無法在像岩石這樣的粗糙表面上操作。
另一種選擇是使用所謂的微刺抓握器。這些抓握器包含一系列細小的銳利鉤子,能夠抓住被攀爬表面上的小凹槽。當抓握器提起以進行下一步攀爬時,這些鉤子會從表面釋放。但一些微刺抓握器是被動的,依靠機械人懸掛身體的重量來保持抓握。這種類型在相對平坦的牆面上效果尚可,但在更不規則的表面,如懸崖面上,則難以應對,需要更多變的攀爬策略。
主動式微刺抓握器通過整合電動執行器來克服這一限制,將一圈鉤子鑽入表面,維持一種任何方向上的機動抓握。然而,這些抓握器往往體積龐大、耗能大且機械複雜,此外,它們的攀爬速度相當慢。這就是LORIS四足機械人的用武之地。
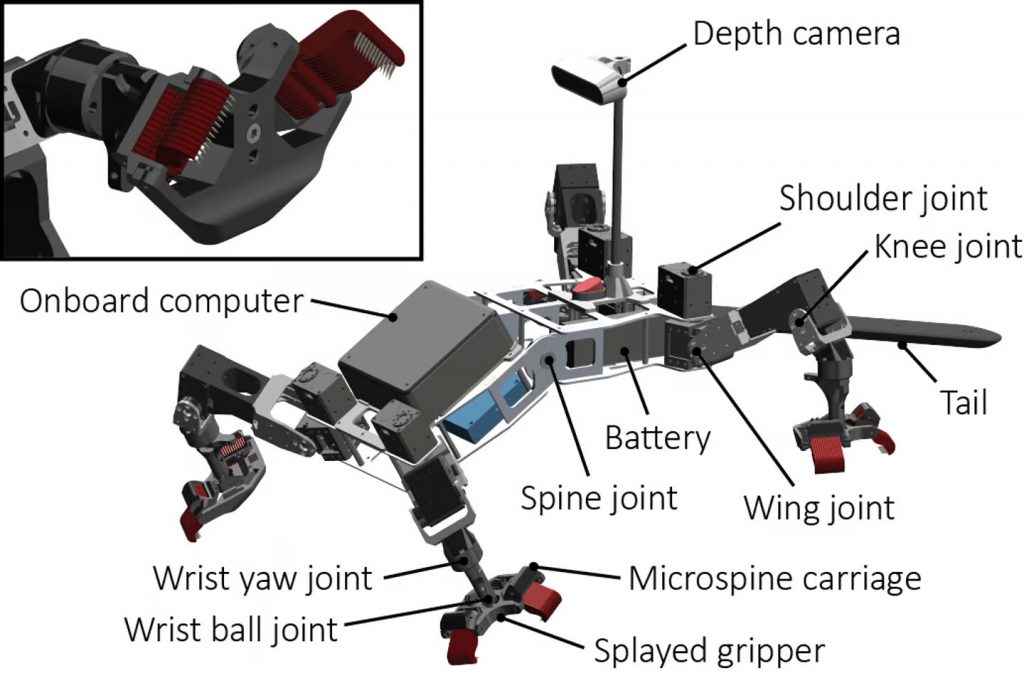
這個裝置由卡內基梅隆大學Robomechanics實驗室的Paul Nadan、Spencer Backus、Aaron M. Johnson及其同事們創造,以一種攀爬有袋類動物命名,同時也代表了「輕量級觀察機械人,用於不規則坡面」的意思。
在機械人四條腿的每一端都有一個展開的微刺抓握器,包含兩組以直角排列的刺。抓握器通過一個被動的腕關節與腿相連。這基本上意味着抓握器只是根據腿的動作隨意擺動。

機械人利用機載深度感測相機和微處理器,以一種策略性的方式前進其腿部,使得當一條腿上的抓握器抓住攀爬表面時,另一條位於身體另一側、身體另一端的對立腿上的抓握器也會這樣做。
只要這兩條對角相對的腿保持對其抓握器的內部張力,這些抓握器就會牢牢地附着在表面上。與此同時,機械人的另外兩條對立腿可以自由地進行下一步攀爬。這是一種受昆蟲啟發的攀爬策略,被稱為定向內部抓握(DIG)。
根據研究人員的說法,LORIS結合了被動微刺抓握器的輕量、速度、能源效率和簡單性,以及主動抓握器的牢固抓握和適應性。作為額外的好處,這個機械人的設計旨在易於且成本低廉地製造。
圖片:Carnegie Mellon University
T10